DynalCLI State Machine
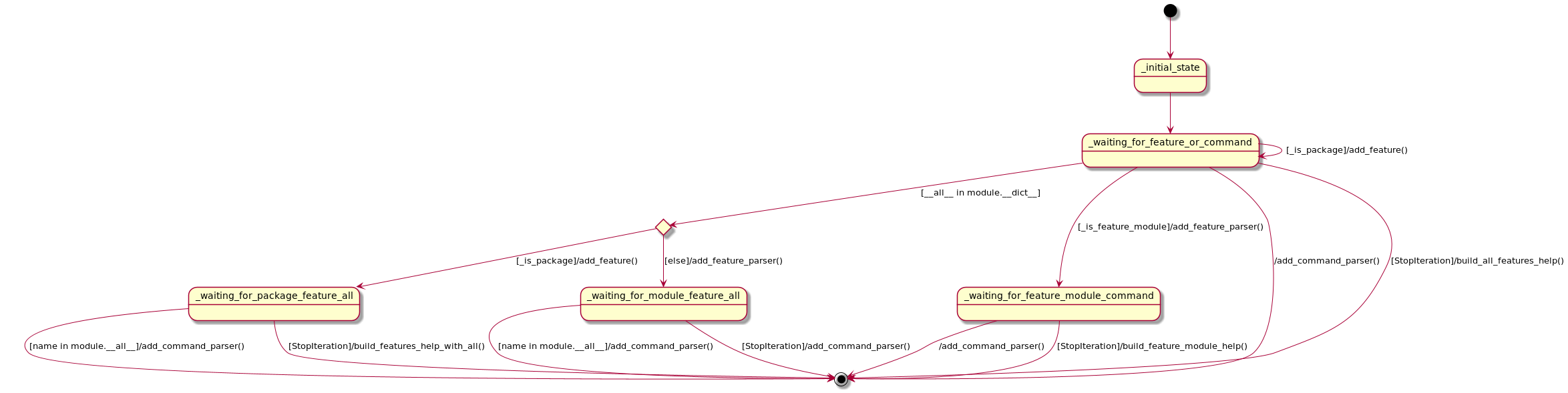
Internally, DynaCLI's main routine is implemented by applying the State Design Pattern (more specifically, function_for_state, but these are internal details) using a state machine for keeping track of the command line arguments processing progress. At a high level, this state machine, illustrated using the lightweight UML Statecharts notation, is presented below:
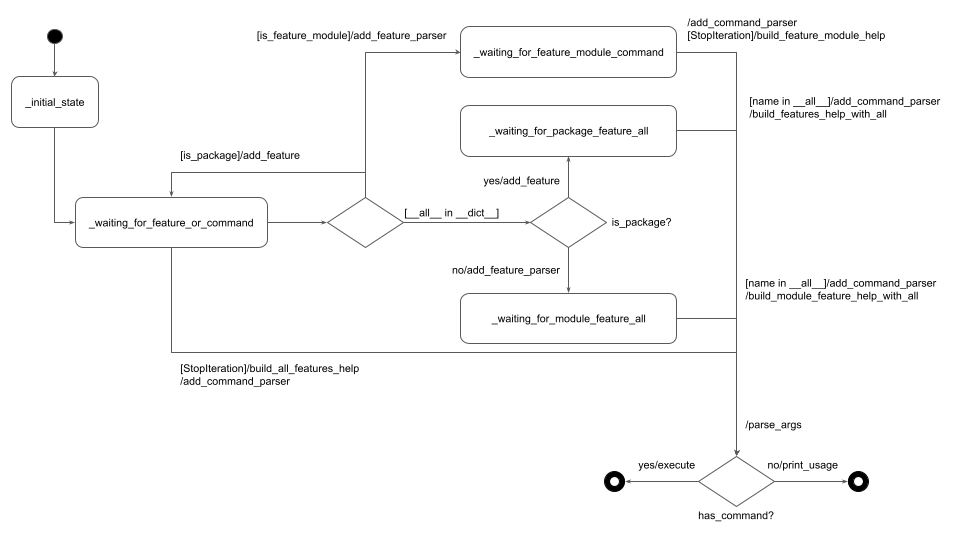
We treat every command line argument as a trigger trying to figure out what to do about it:
- the first entry of sys.argv is treated as a DynaCLI entry point, from which we extract high-level description and version info if any (_initial_state on the diagram)
- every next argument is treated as a Python module name, imported using the importlib.import_module function (_waiting_for_feature_or_command state on the diagram)
- if the import fails, or there are more entries in sys.arg, help for all available features (at the current level) is generated using the pkgutil.iter_modules function
- if import succeeds, the imported module is analyzed whether it has an
__all__specifier or not (we follow Python convention concerning__all__specification) - if it does have
__all__, then based on whether it's a Python package or module, the processing transits to either_waiting_for_package_feature_allor_waiting_for_module_feature_allstate (see below for more detailed description) - otherwise, if the imported module is a package, we extract the package help and version info, if any, using the
__init__.pyfile docstring and__version__specification and push the argparse parsers hierarchy one level down - if it's a regular module, we check if it has a function with the same name
- if it does have a function with the same name, we treat it as a command module, build a complete command parser by analyzing the function signature and docstring, and transit to the final processing
- if it does not have a function with the same module, we treat it as a feature module (each public function will be treated as a command) and transit to _waiting_for_feature_module_command_state
- in the _waiting_for_package_feature_all state, we check whether the next sys.argv entry is in the
__all__list; if it is we perform a normal state selection process outlined above, if it is not, we print a help message for this feature package - in the _waiting_for_module_feature_all state, we check whether the next sys.argv entry is in the
__all__list; if it is we treat it as a command, if it is not, we print a help message for this feature module - in the _waiting_for_feature_module_command, we check whether the next sys.argv entry points to a public function within this module; if it does we treat it as a command, if it does not, we print a help message for this feature module
- at the final stage, we invoke the argparse standard parsing mechanism, check whether a pointer to the command function was obtained, and either execute this command if it was or print a usage message (argparse will print an error message if something was wrong)
Why argparse at all?
One could argue that DynaCLI uses the argparse for printing help and usage messages while actual processing is done by the DynaCLI internal machinery. If so, the question would be "why use the argparse at all".
First, this observation is correct. Second, we wanted to retain the argparse message formatting, which is considered a de-facto standard. Third, considering limited resources and specific needs of the main CAIOS project, we did not want to invest in excavating help and usage message formatting from the argparse internals. While it might add some minor performance overhead we considered it negligible and worth our development effort savings.
TODO: Shako to check whether anything from below still needs to be retained Each state corresponds to a different level.
Effectively, we have 3 main states: feature as a package handler, feature as a module handler, and command handler.
But there is a different state called __all__ handler for going through a different path if there is a __all__
indicated at feature as a package level and feature as a module level.
There is no need to indicate __all__ at the top-level command because it makes no sense.
Basically, we treat each CLI sequence of the commands as different states:
States in this CLI run are described below:
At each iteration we find ourselves in a specific state, yes we use State Design Pattern:
First iteration -> testcli - the script itself is an initial state.
Second iteration -> <feature>- feature as package or feature as module state.
Third iteration -> <command> - command state.
Fourth iteration -> Iterator is exhausted and raised StopIteration which means we are going to build command help.
Let's describe some more variations:
Variations:
./testcli -h : initial state - StopIteration - build all features help
./testcli <feature as package> -h : initial state - add feature as parser - StopIteration - build feature help
./testcli <feature as module> -h : initial state - add feature as parser - StopIteration - build feature as module help
./tescli <feature> <command> -h : initial state - add feature parser - add command parser - StopIteration - build command help
./tescli <feature> <command> arg1 arg2 … : initial state - add feature parser - add command parser - register arguments - execute the function
And based on the fact that if __all__ was found we got a different path to follow but the main idea is to have states for each path.
!!! NOTE
To explore UML please click and open the photo in large size